MOV_INCH – Logic Block Documentation
Overview
The MOV_INCH block is designed to control Motor Operated Valves (MOVs) with inching functionality. It is widely used in industrial automation to allow precise, step-wise operation of valves, providing both automatic and manual (HMI-based) control. This document details the logic behavior, input/output signals, and operational parameters of the MOV_INCH logic block.
- The block ensures that all operational constraints such as interlocks, permissions, feedback, and timeouts are satisfied before commanding valve operations.
Logic Block Illustration
- A visual representation of the MOV_INCH block showing its place in the logic and I/O system.
- Example diagrams include input/output wiring and HMI control integration.
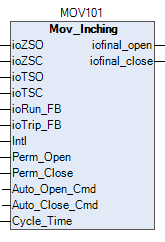
In above picture, we are showing inputs and output of MOV_Inching block.
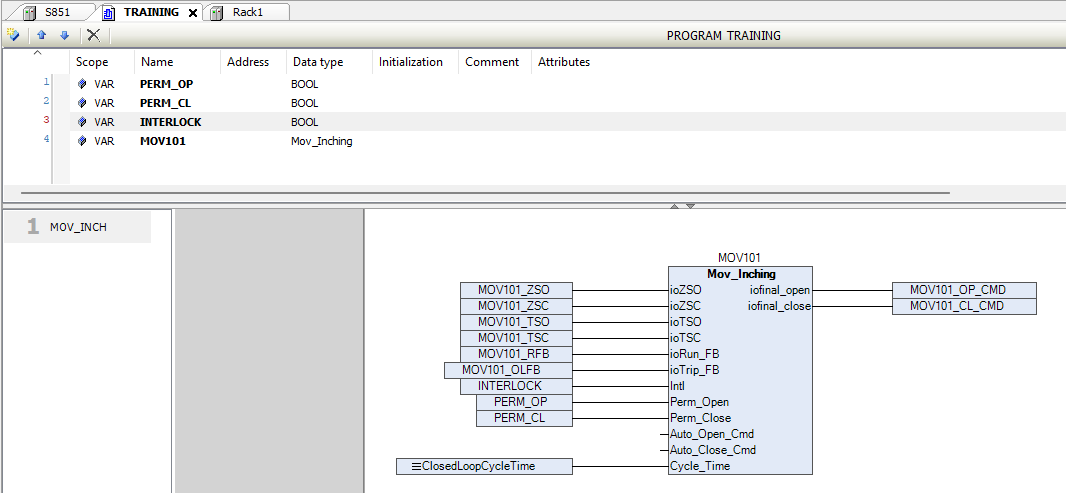
In the above picture, we are showing that how to use the MOV_Inching block.
Pins Information
| Signal | Type | Description |
|---|---|---|
ioZSO |
BIT |
Valve Open Feedback – Indicates valve is fully open. |
ioTSO |
BIT |
Torque Open Feedback – Torque switch signal when valve opens. |
ioTSC |
BIT |
Torque Close Feedback – Torque switch signal when valve closes. |
ioZSC |
BIT |
Valve Close Feedback – Indicates valve is fully closed. |
ioRunFB |
BIT |
Feedback indicating the motor is running. |
ioTripFB |
BIT |
Indicates motor tripped (e.g., via protection relay). |
HMI_OPEN_INCH |
BIT |
Momentary command from HMI to inch the valve open. |
HMI_CLOSE_INCH |
BIT |
Momentary command from HMI to inch the valve close. |
AUTO_OPEN_INCH |
BIT |
Momentary open inch command from other logic (Auto mode). |
AUTO_CLOSE_INCH |
BIT |
Momentary close inch command from other logic (Auto mode). |
Mode |
BIT |
Manual = 0, Auto = 1. |
ioOPEN_CMD |
BIT |
Output signal to open the valve (momentary pulse). |
ioCLS_CMD |
BIT |
Output signal to close the valve (momentary pulse). |
perm_Open |
BIT |
External permissive for open command. Must be TRUE to allow operation. |
perm_CLS |
BIT |
External permissive for close command. |
intl |
BIT |
Interlock. TRUE means interlock is active and motion is blocked. |
FB_Fault |
BIT |
ZSO/ZSC not received within the configured window. |
CMD_Fault |
BIT |
Run feedback not received after command or received unexpectedly. |
unrecog_operation |
BIT |
Valve is running but feedback is missing or inconsistent. |
Run_FB_Timer |
REAL |
Time allowed for RunFB to respond after command is issued. |
Run_FB_Counter |
REAL |
Runtime counter while waiting for motor run feedback. |
ZS_Timer |
BIT |
Active while valve is moving (ZSO → ZSC or vice versa). |
ZS_Counter |
REAL |
Time duration of current valve movement. |
opened_time |
REAL |
Total accumulated open time. |
closed_time |
REAL |
Total accumulated close time. |
open_count |
DINT |
Number of open inching operations. |
close_count |
DINT |
Number of close inching operations. |
R_Trig_ZSO |
R_TRIG |
Rising edge trigger for Open feedback signal. |
R_Trig_ZSC |
R_TRIG |
Rising edge trigger for Close feedback signal. |
valve_running |
BIT |
TRUE when the valve is in motion. |
HMI_Interface_hardware |
WORD |
Interface data exchanged with HMI. |
CycleTime |
REAL |
Execution cycle time of the logic block. |
Desc |
STRING(10) |
Short description or tag (max. 10 characters). |
TagName |
STRING(12) |
Valve identifier (max. 12 characters). |
Operational Summary
- The MOV_INCH block allows inching (momentary jog) control in Manual (HMI) or Auto (logic) mode.
- Inching commands must be momentary pulses; each pulse causes a small valve movement.
- Only one command (open or close) is active at any time.
- Before executing commands, permissives and interlocks are validated.
- Feedback signals (
ioZSO,ioZSC,ioRunFB) confirm valve position and motion. - Fault detection logic ensures command execution is verified by feedback within time limits.
- Timers and counters track runtime, usage analytics, and valve behavior.
- Intended for valves requiring precise, short-step motion with high control granularity.
Training Demo Video
Demonstration video is available , How to use the MOV_INCHING Logic Block through Library:
MOV-INCH Block Demo - TPW Logic Setup
Best Practices
- Always validate
PERM_OPEN,PERM_CLOSE, andINTERLOCKbefore motion. - Use rising edge detection (
ZSO_TRIG,ZSC_TRIG) to count operations accurately. - Set inching command pulse duration and timeout (
INCH_TIMEOUT) based on actuator specs. - Use conservative values for feedback timeouts to prevent false positives.
- Manually reset faults and trips after resolving physical or electrical issues.
End of MOV_INCH Logic Block Documentation